路线规划类 最后更新时间: 2026年05月27日
输出数据协议说明
Query分类 | 对话轮次 | Query | 结果返回 |
行前路线信息查询 | 首次 | “骑车去XXX需要多久?”、“步行去XXX需要多久?”、“开车去XXX需要多久?”、“骑车去XXX多久到?”、“步行去XXX多久到?”、“开车去XXX多久到?”、“最快骑车到XXX需要多久?”、“去XXXX有多远?” | 总结信息 |
启动导航 query未携带出行方式 | 首次 | “导航去xxx”、“帮我导航到xxx”、“开始导航到xxx” | CMD(导航) Components(起终点、出行方式、算路策略) |
启动导航 query携带出行方式 | 首次 | “开车去xxx”、“骑车去xxx”、“走路去xxx” | CMD(导航) Components(起终点、出行方式、算路策略、多条路线) |
行中信息查询 | 首次 | “还有多久到?”、“还有多少距离?”、“还有多远?”、“几点能到?”、“预计几点到?” | 总结信息 |
行中目的地变更 | 首次 | “回家”、“去学校”、“去公司”、“去XXX” | CMD(算路) Components(起终点、路线、出行方式、算路策略) |
行中添加途径点(只能加一个途径点) | 首次 | “先去趟公司”、“先去XXX”、“改去加油站”、“先去趟加油站” | CMD(算路) Components(起终点、途径点、路线、出行方式、算路策略) |
多轮 | 已为您找到xxx,选择第几个? | ||
“第一个”、“第二个” | |||
已为您选中第一个,是否添加为途径点? | |||
“是、“否” | |||
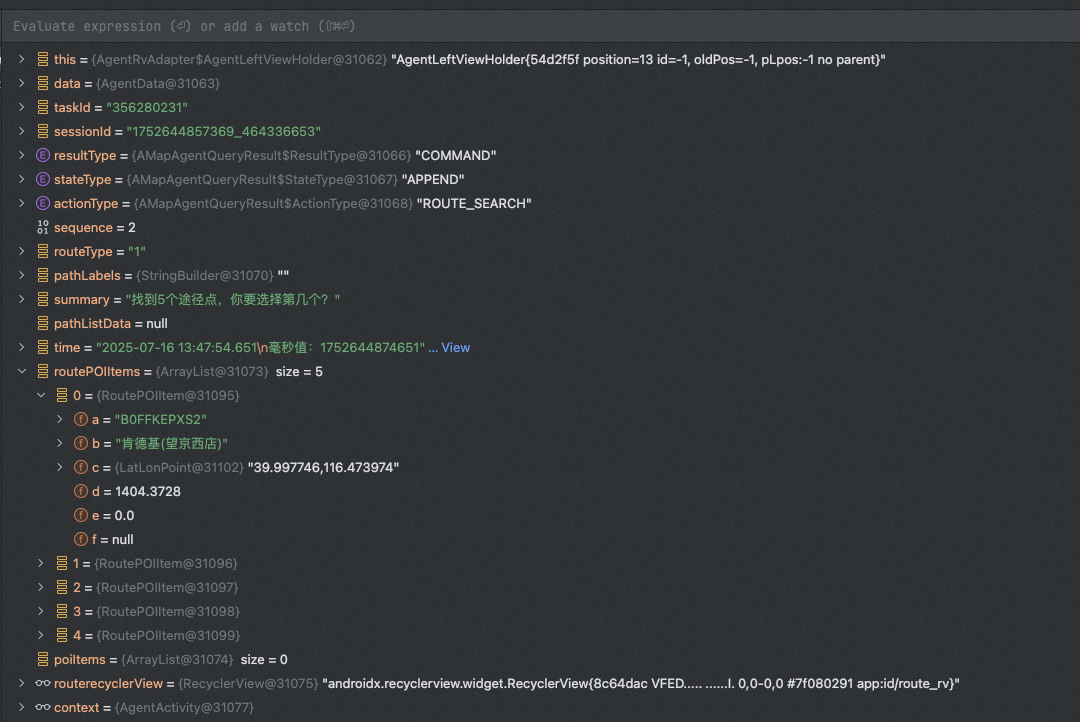
行中添加顺路搜的结果为途径点 | 首次 | “顺路去下加油站”、“顺路去下XXX” | CMD(算路) Components(起终点、途径点、路线、出行方式、算路策略) |
多轮 | 已为您找到xxx,选择第几个? | ||
“第一个”、“第二个” |
示例
导航去天安门 -> 顺路去肯德基 -> 第一个
反馈结果(规划路线数据截图展示):